Lineær algebra
Lineær algebra er den delen av matematikken som omhandler vektorer og vektorrom, samt lineære transformasjoner. Fagfeltet inngår som en del av algebra og er grunnleggende for all moderne matematikk.
Lineære transformasjoner kan ofte representeres ved matriser, og studiet av egenskapene til matriser er sentralt i lineær algebra. Også teori for lineære ligninger er inkludert i fagfeltet.
Lineær algebra er sentralt for både ren og anvendt matematikk. For eksempel oppstår abstrakt algebra ved å myke opp aksiomer i et vektorrom, noe som fører til en rekke generaliseringer. Funksjonsanalyse studerer uendelig-dimensjonale versjoner av det teoretiske vektorrom. Kombinert med matematisk analyse letter lineær algebra løsning av lineære differensialligningssystemer. Teknikker fra lineær algebra er også brukt i analytisk geometri, ingeniørvitenskap, fysikk, naturfag, informatikk og samfunnsfag (spesielt innen økonomi). Fordi lineær algebra er en velutviklet teori gjør ikke-lineære matematiske modeller lineære approksimasjoner.
Historie

Studiet av lineær algebra og matriser har sin opprinnelse i studiet av determinanter, som ble brukt til å løse lineære ligningssystemer. Determinanter ble brukt av Leibniz i 1693 og i 1750 ble Cramers regel funnet for å løse slike ligninger. Senere videreutviklet Gauss teorien om løse lineære systemer ved hjelp av Gauss-eliminasjon, noe som opprinnelig ble sett på som et framskritt innen geodesien.[1]
Studiet av matrisealgebra dukket først opp i England på midten av 1800-tallet. I 1848 introduserte Sylvester begrepet matrise som er latin for «livmor». Mens han studerte sammensetninger av lineære transformasjoner, ble Cayley inspirert til å definere matrisemultiplikasjon og inverser. Han brukte én enkelt bokstav for å betegne en matrise, noe som ble viktig fordi man på den måten behandlet en matrise som et samlet objekt. Han innså også sammenhengen mellom matriser og determinanter, og skrev «Det er mange ting å si om denne teorien om matriser som, etter min oppfatning, bør komme før teorien om determinanter».[1]
Den første moderne og mer presise definisjon av et vektorrom ble introdusert av Peano i 1888. Han bygget her på et matematisk apparat som var blitt lansert førti år tidligere av Grassmann, men i stor grad blitt oversett.[1] Ved århundreskiftet hadde man dermed en teori for lineære transformasjoner i endelig-dimensjonale vektorrom. Lineær algebra fikk sin moderne form i første halvdel av det tjuende århundre, da mange ideer og metoder fra tidligere århundrer var generalisert som abstrakt algebra. Bruk av matriser i kvantemekanikk, relativitetsteori og statistikk bidro til å spre området lineær algebra ut over den rene matematikken. Utviklingen av datamaskiner førte til økt forskning på effektive algoritmer for Gausseliminasjon og matrisenedbrytning, og lineær algebra ble et viktig verktøy for modellering og simulering.[1]
Nylig hevdet sinologen Roger Hart at kinesiske matematikere hadde funnet en metode som i hovedsak «tilsvarer løsningen av systemer av N ligninger i N ukjente i moderne algebra» et årtusen før Vesten.[2]
Sentrale begrep
Algebra er en gren av matematikk som generaliserer tallregning ved å la bokstaver eller andre symboler representere tall. Lineær algebra er igjen en del av algebra der en studerer lineære operasjoner mellom størrelser. Sentrale begrep i lineær algebra er vektorrom og transformasjoner mellom slike rom.
Vektorrom
Et vektorrom V er en mengde av elementer, kalt vektorer, der det er definert to operasjoner, vektoraddisjon og skalarmultiplikasjon. Vektoraddisjonen er en regel som til hvert par av elementer x og y i V tilordner et nytt element (x+y) som også er inneholdt i V. Tilsvarende er skalarmultiplikasjon en regel som for hver skalar a og hvert element x i V tilordner et nytt element (ax) i V.
Operasjonene i et vektorrom er lineære, og sammensatte elementer som (ax+by) kalles for lineærkombinasjoner.
Alle vektorene i et vektorrom kan uttrykkes som en lineærkombinasjon av vektorene i en algebraisk basis for vektorrommet. Dimensjonen til vektorrommet er lik antall vektorer i basisen, og denne dimensjonen kan være både endelig og uendelig.
En vektor i et endeligdimensjonalt rom kan uttrykkes ved hjelp av en koordinatvektor (a1, a2,...,an) der ai er reelle eller komplekse tall.
Lineære transformasjoner
En lineær transformasjon er en funksjon mellom to vektorrom som bevarer operasjonene vektoraddisjon og skalarmultiplikasjon. Også begrepene lineær avbilding, lineær funksjon, lineær mapping og lineær operator blir brukt.
En funksjonen er en lineær transformasjon hvis det for alle vektorer x og y i V og alle skalarer a i K gjelder at

Parentesen rundt argumentet til funksjonen blir ofte utelatt, slik at en skriver T(x) = Tx.
En affin transformasjon er en funksjon sammensatt av en ikke-singuær lineær transformasjon og en translasjon, det vil si en funksjon F på formen

Her er T en ikke-singulær lineær transformasjon, og z er en vektor i vektorrommet som er verdiområdet til T.
Matriser og determinanter


En matrise er et rektangulært sett av tall, ordnet i rader og kolonner. En lineær transformasjon mellom to endeligdimensjonale vektorrom kan representeres entydig ved en matrise. Når en studerer egenskapene til matriser studerer en dermed også egenskapene til en viktig klasse av lineære transformasjoner. Matriser er også viktige for å behandle lineære algebraiske ligningssystem. Et slikt system kan skrives på formen

der A er en matrise og b en kjent vektor, mens x er en vektor der komponentene er de ukjente i ligningssystemet. For et system med like mange ligninger som ukjente kan en formelt skrive løsningen som

Løsningen eksisterer dersom den inverse matrisen A-1 er definert.
Determinanten til en kvadratisk matrise er reelt eller komplekst tall bestemt av elementene i matrisen:

Den inverse matrisen eksisterer hvis og bare hvis determinanten til matrisen er ulik null.
Egenverdi og egenvektor
En egenverdi og en egenvektor til en lineær transformasjon T er samhørende verdier og x som oppfyller ligningen

- .

Egenverdien er en skalar. En egenvektor endrer ikke retning når den avbildes av transformasjonen. Problemet å bestemme samhørende verdier for egenverdien og egenvektoren kalles å løse et egenverdiproblem.
Egenverdier og egenvektorer spiller en svært viktig rolle i studiet av lineære transformasjoner, blant annet for å kartlegge hvilke egenskaper til transformasjonen som er uavhengig av valg av basis i definisjonsområdet og verdimengden til transformasjonen..
Lineære ligninger
Lineære ligninger er ligninger på formen

der A er en skalar, en matrise eller en lineær transformasjon. Den ukjente x er en vektor i et vektorrom.
Lineære matriseligninger kan løses ved hjelp av Cramers regel eller ved Gauss-eliminasjon.
Lineær algebra og geometri
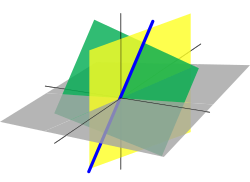
Lineær algebra er nært knyttet til geometri. Mange tidlige matematikere, inkludert Pytagoras, forsøkte å knytte geometri sammen med tall. Dette lot seg først gjøre i mer fullstendig form etter introduksjonen av reelle tall, og med utviklingen av analytisk geometri på 1600-tallet. Posisjonen til et objekt i rommet kan beskrives med en tre-dimensjonal stedvektor. Rotasjon, skalering, refleksjon og projeksjon er alle operasjoner som kan beskrives med lineære transformasjoner.
Affin geometri er studiet av geometriske egenskaper som er bevart under affine transformasjoner. Bruken av affine transfomasjoner gjør at også translasjon – eller parallellforskyving – er inkludert i samlingen av geometriske operasjoner som studeres.
Numerisk lineær algebra
Numerisk lineær algebra er studiet av algoritmer for å løse problemstillinger i lineær algebra numerisk. Slike algoritmer er svært viktige for mange beregninger utført på datamaskiner, for eksempel i numerisk værvarsling.
Referanser
- ^ a b c d Vitulli, Marie. «A Brief History of Linear Algebra and Matrix Theory». Department of Mathematics. University of Oregon. Arkivert fra originalen 10. september 2012. Besøkt 24. januar 2012. «Arkivert kopi». Arkivert fra originalen 10. september 2012. Besøkt 9. desember 2012.
- ^ Hart, Roger (2010). The Chinese Roots of Linear Algebra. JHU Press. s. 192.
Eksterne lenker
- Lineær algebra støttesider, Universitetet i Oslo Besøkt 30. juni 2010.
- Electronic Journal of Linear Algebra Besøkt 30. juni 2010.
- International Linear Algebra Society Arkivert 3. januar 2014 hos Wayback Machine. Besøkt 30. juni 2010.
- A first course in linear algebra Gratis lærebok fra Digital Textbook Initiative. Besøkt 30. juni 2010.
- Introduction to linear algebra YouTube. Besøkt 30. juni 2010.











