Kreisverstärkung
Unter der Kreisverstärkung eines Regelkreises wird die statische Verstärkung des Reglers und der Regelstrecke für den „geschlossenen“ oder den „geöffneten“ Regelkreis als unterschiedliche Anwendungen verstanden.


In der Regelungstechnik wird häufig für die Beschreibung dynamischer Systeme sowie deren Komponenten das Verfahren der Übertragungsfunktion G(s) angewendet, welches sich auf Laplace-transformierte Differenzialgleichungen der Systeme beziehen.
Die Übertragungsfunktion (Bildbereich) wird algebraisch behandelt und kann auch in den Originalbereich zurück transformiert werden.[1]
In erster Linie interessiert bei der Konzeption eines Regelkreises dessen Stabilität, zulässige Regelabweichung und das Einschwingverhalten der Regelgröße y(t) als Funktion der Führungsgröße w(t). Diese Größen sind von der statischen Kreisverstärkung, sowie von weiteren dynamischen Regelkreis-Elementen wie Integratoren -Gliedern und -Gliedern abhängig.


Einfache grafische Verfahren der Stabilitätsbestimmung sind die Ortskurve des Frequenzgangs und das Bodediagramm.
Die numerische Berechnung der Regelkreisglieder mit Differenzengleichungen erlaubt die näherungsweise Darstellung des zeitlichen Verlaufs der Regelgröße Y(k) als Funktion der Eingangsgröße W(k) in Form von nummerierten Zahlenwerten im Abstand .
![{\displaystyle k=[0,1,2,3,\dotsc ,k_{\text{max}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c7dfbb7225598aae4c29cf213d8960aa4fdc252e)

Übliche mathematische Verfahren der Berechnung eines Regelkreises
Das Blockschaltbild eines Regelkreises kann mit mathematischen Modellen:
- gewöhnlichen Differenzialgleichungen ,
- mit der Übertragungsfunktionen oder alternaiv mit dem Frequenzgang ,
- numerisch mit Differenzengleichungen (Differenzenverfahren) über Differenzenquotienten .




dargestellt und beschrieben werden.


Regelkreisverstärkung des aufgeschnittenen Regelkreises
- Die Betrachtung des offenen Regelkreises als Reihenschaltung (Produktdarstellung) hat einige Vorteile für den Regelkreisentwurf:
- Die Rückführung der Ausgangsgröße, die Regelgröße , wird gedanklich oder in praxi vor der Regeldifferenz des Soll-Istwert-Vergleiches unterbrochen. (Ohne Messglied in der Rückführung).
- Damit wird die Führungsgröße die Eingangsgröße des aufgeschnittenen Regelkreises und die Ausgangsgröße zu einer Steuerkette in Reihenschaltung.
- Die Übertragungsfunktion eines Beispiels mit einem Regler und einer Regelstrecke lautet mit der Verstärkung des P-Reglers und der Verstärkung der Regelstrecke und 3 Verzögerungsgliedern 1. O. des offenen Regelkreises:




- .
- Aus dieser Gleichung ist die statische Kreisverstärkung deutlich erkennbar. Übertragungsglieder in der Rückführung, sofern vorhanden, multiplizieren sich mit dem Regler und der Strecke.


- Ein -Glied als alleinstehendes Glied darf nicht in der Signalkette enthalten sein, anderenfalls läuft die Ausgangsgröße bzw. in die Begrenzung.




- Bestimmung der Regler-Parameter
- Aus der Übertragungsfunktion des offenen Regelkreises können unmittelbar weitere Regelparameter des Reglers für den geschlossenen Regelkreis ermittelt werden, indem durch Kompensation der Verzögerungsglieder der Regelstrecke mit einzufügenden -Gliedern des Reglers bei gleichen Zeitkonstanten vorgenommen wird.
- Für diesen Fall, dass nur noch ein PT1-Glied im geschlossenen Regelkreis noch wirksam ist, kann theoretisch eine unendlich hohe K-Verstärkung gewählt werden, ohne eine Schwingneigung der Regelgröße befürchten zu müssen.
- Diese Beziehung gilt für das „ideale“ -Glied, das technisch als Hardware nicht realisierbar ist. Es ist nicht möglich, z. B. für einen Eingangssprung , ein Ausgangssignal mit unendlich großer Amplitude zu realisieren.
- Reale -Glieder enthalten zusätzlich eine kleine Verzögerung z. B. .
- Siehe Artikel Regler.







- Stabilitätsbedingung mit der Ortskurve des Frequenzgangs des offenen Regelkreises
- Wird beim Durchlaufen der Ortskurve des offenen Regelkreises in Richtung steigender Werte von der kritische Punkt (−1; j0) auf der linken (negativen) Seite der Achse der Realteile nicht umschlungen bzw. berührt, ist der geschlossene Regelkreis stabil.


- Stabilitätsbedingung im Bode-Diagramm des offenen Regelkreises mit dem vereinfachten Stabilitätskriterium von Nyquist
- Ein geschlossener Regelkreis ist stabil, wenn die nacheilende Phasenverschiebung vom Ausgangs- zum Eingangssignal des offenen Regelkreises bei der Kreisverstärkung und beträgt.



Kreisverstärkung des geschlossenen Regelkreises
- Blockschaltbild der Gegenkopplung bzw. Rückkopplung von 2 Übertragungsfunktionen:
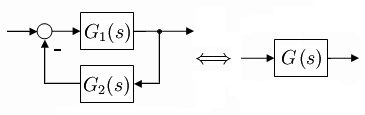
- Gleichung der Übertragungsfunktion für ein Meßglied in der Rückführung:[2]

- .

- Ist das Messglied in der Rückführung nicht vorhanden, dann lautet die Übertragungsfunktion für G(s) des geschlossenen Kreises:
- .

- Übertragungsfunktion eines Beispiels für einen Regelkreis mit gleich 2 Verzögerungsgliedern und Verstärkungsfaktoren (PT1-Gliedern, offener Regelkreis):

- Das Störglied D(s) kann sich statisch oder dynamisch verhalten und wird hier nicht betrachtet.
- .
- Wird in den offenen Regelkreis G1(s) ein „ideales“ PD1-Glied:
- eingefügt mit gleicher Zeitkonstante , dann kompensieren sich das PT2-Glied mit dem PD1-Gied zu dem Faktor 1.
- Die Übertragungsfunktion des offenen Kreises lautet dann mit dem PD1-Glied im Regler:
- .
- Die Übertragungsfunktion des geschlossenen Regelkreises lautet damit:
- .





- Darstellung der Führungs-Übertragungsfunktion für den geschlossenen verzögerungsfreien Regelkreis: Störgröße D = 0.
- .

- Aus dieser Darstellung wird das statische Verhalten der Ausgangsgröße y(t) eines Regelkreises mit einem P-Regler deutlich. Die Regelgröße y(t) erreicht je nach Größe der Kreisverstärkung und nicht den Wert der Führungsgröße , weil . Bei großer -Verstärkung wird .



- Bei diesem Beispiel eines Regelkreises mit einem Verzögerungsglied kann beliebig hoch gewählt werden, denn es handelt sich hier mit dem Einsatz eines P-Reglers um einen schnellen, genauen, schwingfreien Regelkreis.
- In der Hardware-Praxis wird man keine unbegrenzten P-Regler-Verstärkungen realisieren können, weil reale PD1-Glieder eine kleine Verzögerung aufweisen müssen.
- Numerische Berechnung der Regelgröße

- Sämtliche Übertragungsglieder des Reglers und der Strecke werden über Differenzengleichungen numerisch berechnet. Der zeitliche Verlauf der Regelgröße als Funktion der Eingangsgröße (Führungsgröße) ergibt sich für den geschlossenen Regelkreis mit der Schließbedingung .
- Eine Differenzengleichung ist eine numerisch lösbare rekursive Berechnungsvorschrift für eine diskret definierte Wertefolge von nummerierten Folgeelementen bzw. Stützstellen im Abstand eines meist konstanten Intervalls .[3]
- Je höher die Anzahl der Wertefolgen in einem Zeitbereich gewählt wird, um so höher ist die Genauigkeit der Berechnung. Rundungsfehler bei nicht ausreichender Stellengenauigkeit addieren sich bei jedem Folgeglied.



- Siehe Artikel Differenzengleichung (Differenzenverfahren)
Anwendungen
In der Regelungstechnik können über die Kreisfrequenz bestimmte Eigenschaften des Regelkreises optimiert werden. Die Elektrotechnik kennt den konzeptionell ähnlichen Begriff der Schleifenverstärkung, die das Verhalten rückgekoppelter elektronischer Schaltungen bestimmt. In der biomedizinischen Kybernetik wird das Konzept der Kreisfrequenz bei Haltereglern als Dispositionsindex bezeichnet. Mit Dispositionsmetriken wird z. B. die Güte der Insulin-Glukose-Homöostase beurteilt.
Einzelnachweise
- ↑ Lutz, Wendt: Taschenbuch der Regelungstechnik. Mit MATLAB und Simulink. 11., ergänzte Auflage. Verlag Europa-Lehrmittel, Haan-Gruiten 2019, ISBN 978-3-8085-5869-0, Hauptkapitel: Mathematische Transformationen. Unterkapitel: Original- und Bildbereich.
- ↑ Lutz, Wendt: Taschenbuch der Regelungstechnik. Mit MATLAB und Simulink. 11., ergänzte Auflage. Verlag Europa-Lehrmittel, Haan-Gruiten 2019, ISBN 978-3-8085-5869-0, Hauptkapitel: Berechnung von Regelkreisen mit Proportionalelementen.
- ↑ Lutz, Wendt: Taschenbuch der Regelungstechnik. Mit MATLAB und Simulink. 11., ergänzte Auflage. Verlag Europa-Lehrmittel, Haan-Gruiten 2019, ISBN 978-3-8085-5869-0, Hauptkapitel: Mathematische Methoden zur Berechnung von digitalen Regelkreisen. Unterkapitel: Differenzengleichungen.
Weblinks
- Akademie Raddy: P-Regler ► Beispiel Heizung ► Kreisverstärkung berechnen mit Formel für Regeldifferenz. Video.
Literatur
- Holger Lutz, Wolfgang Wendt: Taschenbuch der Regelungstechnik. Mit MATLAB und Simulink. 12., ergänzte Auflage. Verlag Europa-Lehrmittel, Haan-Gruiten 2021, ISBN 978-3-8085-5870-6.
- Jan Lunze: Regelungstechnik. 2 Bände.
- (Band) 1: Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen. 6. Auflage. Springer, Berlin u. a. 2007, ISBN 978-3-540-70790-5;
- (Band) 2: Mehrgrößensysteme, Digitale Regelung. 4. Auflage. Springer, Berlin u. a. 2006, ISBN 3-540-32511-5.








